Map It Anywhere: Empowering BEV Map Prediction using Large-scale Public Datasets
Cherie Ho*, Jiaye Zou*, Omar Alama*, Sai Mitheran Jagadesh Kumar, Benjamin Chiang, Taneesh Gupta,
Chen Wang, Nikhil Keetha, Katia Sycara, Sebastian Scherer
Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024
[Website] [PDF] [Code]
Hi, I’m Cherie! I am a Postdoctoral researcher at Stanford University working with Prof. Jeannette Bohg. I recently completed my PhD in the Robotics Institute at Carnegie Mellon University, where I was advised by Prof. Sebastian Scherer.

My research interest is in the intersection of field robotics, computer vision and machine learning to develop robots that can continuously learn in new scenarios by reasoning about uncertainties and consequences. Developing such robots can break the need of immense human engineering when encountering new situations and environments and pave the way for robots capable of operating effectively and at scale in diverse scenarios. I am most recently working on mobile manipulators.
Email: cherieho at stanford dot edu
CV / Google Scholar / Twitter / LinkedIn
During my PhD, I interned with Ashish Kapoor and Shuang Ma at Microsoft. I did my undergrad at Harvey Mudd College, where I worked with Chris Clark on shark-tracking underwater robots. Between Harvey Mudd and CMU, I cofounded Zenith Robotics with Chris Clark and Vai Viswanathan.
Recent News
- April 2025 Honored to be one of the 33 RSS Pioneers See you in LA!
- Jan 2025 2 papers accepted to ICRA 2025! One on predicting world models for exploration, another on autonomous exploration and adaptation for offroad driving.
- Oct 2024 Thrilled to be at OECD in Paris for the AI and the Future of Skills AI expert meeting. Stay tuned for more exciting work in Robotics + Public Policy…
- Sep 2024 Paper on empowering map prediction with large-scale public data accepted to NeurIPS 2024! Looking forward to Vancouver!
- Jul 2024 Paper on online learning for offroad driving accepted to IROS 2024! See you in Abu Dhabi!
- Mar 2024 Our workshop on autonomous offroad driving is accepted to ICRA 2024!
Selected Publications
See the full list of my publication here.
2024

Learning-on-the-Drive: Self-supervised Adaptation of Visual Offroad Traversability Models
Cherie Ho*, Eric Chen*, Mukhtar Maulimov, Chen Wang, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2024
[PDF]
Cherie Ho*, Eric Chen*, Mukhtar Maulimov, Chen Wang, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2024
[PDF]
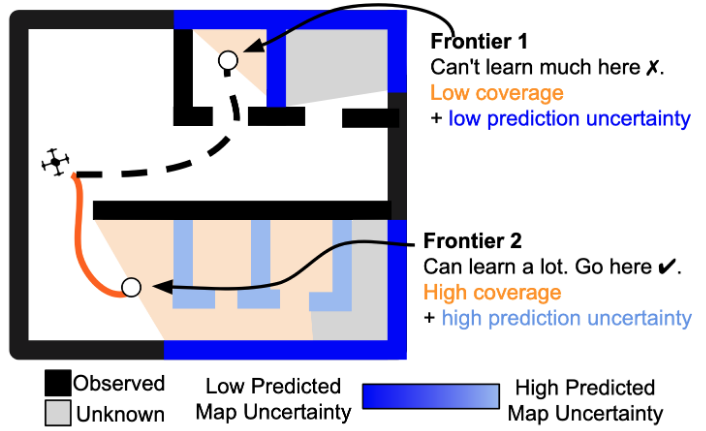
MapEx: Indoor Structure Exploration with Probabilistic Information Gain from Global Map Predictions
Cherie Ho*, Seungchan Kim*, Brady Moon, Aditya Parandekar, Narek Harutyunyan, Chen Wang, Katia Sycara, Graeme Best, Sebastian Scherer
ICRA, 2025
[PDF]
Cherie Ho*, Seungchan Kim*, Brady Moon, Aditya Parandekar, Narek Harutyunyan, Chen Wang, Katia Sycara, Graeme Best, Sebastian Scherer
ICRA, 2025
[PDF]
SALON: Self-supervised Adaptive Learning for Off-road Navigation
Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Shubhra Aich, Jeric Lew, Isaiah Adu, Wenshan Wang, Sebastian Scherer
ICRA, 2025
[Website] [PDF] [Code]
Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Shubhra Aich, Jeric Lew, Isaiah Adu, Wenshan Wang, Sebastian Scherer
ICRA, 2025
[Website] [PDF] [Code]
2021
3D Human Reconstruction in the Wild with Collaborative Aerial Cameras
Cherie Ho, Andrew Jong, Harry Freeman, Rohan Rao, Rogerio Bonatti, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2021
[PDF] [Video]
Cherie Ho, Andrew Jong, Harry Freeman, Rohan Rao, Rogerio Bonatti, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2021
[PDF] [Video]
Honors & Awards
- 2019-2021 Croucher Scholarship for Doctoral Study (Full Scholarship)
- 2019 Best Paper Finalist, IROS Vision-based Drones Workshop
- 2018 HMC INQ Inaugural Class (Harvey Mudd Startup Incubator)
- 2017 Harvey Mudd College Johnson Excellence in Engineering Award
- 2017 Harvey Mudd College Engineering Departmental Honors
- 2016 University of Southern California Wrigley Institute Graduate Summer Fellowship (as an undergraduate)
- 2014 - 2017 Jude and Eileen Laspa Fellowship in Autonomous Systems
- 2015 First Place, MuddHacks (Gesture-controlled helicopter)