MessyMem: Learning-from-Doing Memory for Mobile Manipulation
Anuva Banwasi, William Muckelroy III, Priya Sundaresan, Linfeng Zhao, Jeannette Bohg, Cherie Ho
2026

MessyNav: Zero-Shot Navigation via Manipulation in Messy Environments
Kenneth Llontop, Cherie Ho, Dylan Zhou, Anuva Banwasi, Carlota Pares-Morlans, Priya Sundaresan, Jeannette Bohg
Kenneth Llontop, Cherie Ho, Dylan Zhou, Anuva Banwasi, Carlota Pares-Morlans, Priya Sundaresan, Jeannette Bohg
Robot-Powered Data Flywheels: Deploying Robots in the Wild for Continual Data Collection and Foundation Model Adaptation
Jennifer Grannen, Michelle Pan, Kenneth Llontop, Cherie Ho, Mark Zolotas, Jeannette Bohg, Dorsa Sadigh
arXiv preprint, 2026
[Website] [PDF]
Jennifer Grannen, Michelle Pan, Kenneth Llontop, Cherie Ho, Mark Zolotas, Jeannette Bohg, Dorsa Sadigh
arXiv preprint, 2026
[Website] [PDF]
2025
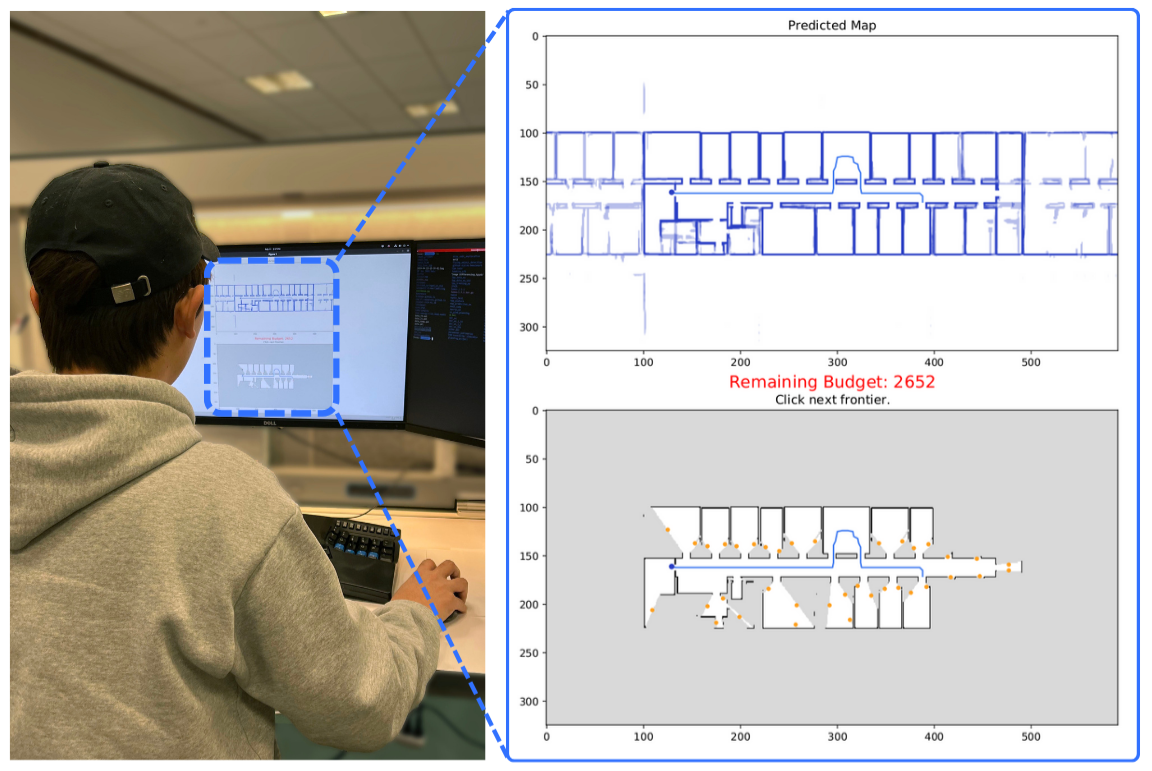
MapExRL: Human-Inspired Indoor Exploration with Predicted Environment Context and Reinforcement Learning
Narek Harutyunyan, Brady Moon, Seungchan Kim, Cherie Ho, Adam Hung, Sebastian Scherer
IEEE International Conference on Advanced Robotics (ICAR), 2025
[Website] [PDF]
Narek Harutyunyan, Brady Moon, Seungchan Kim, Cherie Ho, Adam Hung, Sebastian Scherer
IEEE International Conference on Advanced Robotics (ICAR), 2025
[Website] [PDF]
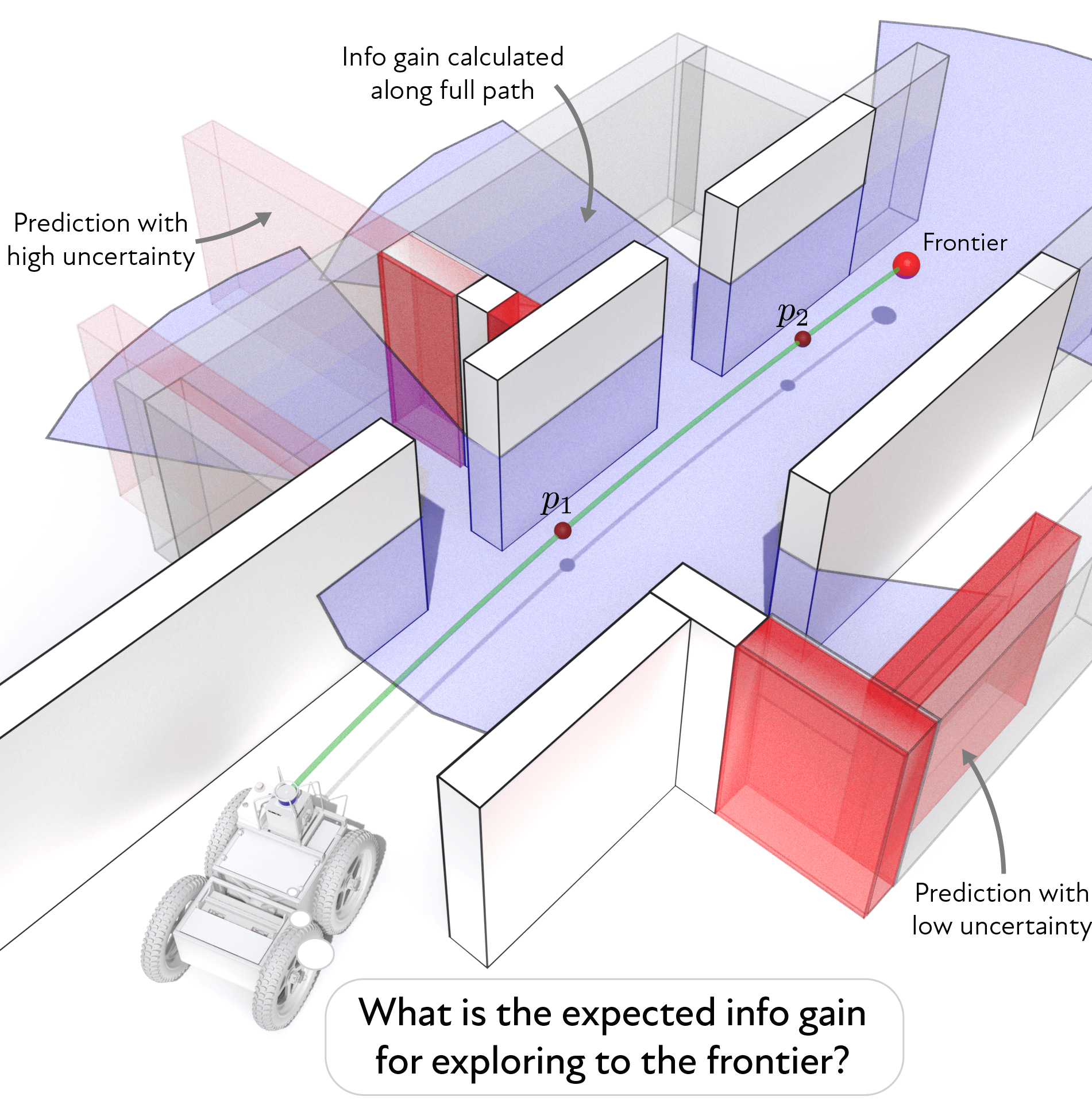
PIPE Planner: Pathwise Information Gain with Map Predictions for Indoor Robot Exploration
Seungjae Baek, Brady Moon, Seungchan Kim, Muqing Cao, Cherie Ho, Sebastian Scherer, Jeong hwan Jeon
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
Seungjae Baek, Brady Moon, Seungchan Kim, Muqing Cao, Cherie Ho, Sebastian Scherer, Jeong hwan Jeon
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
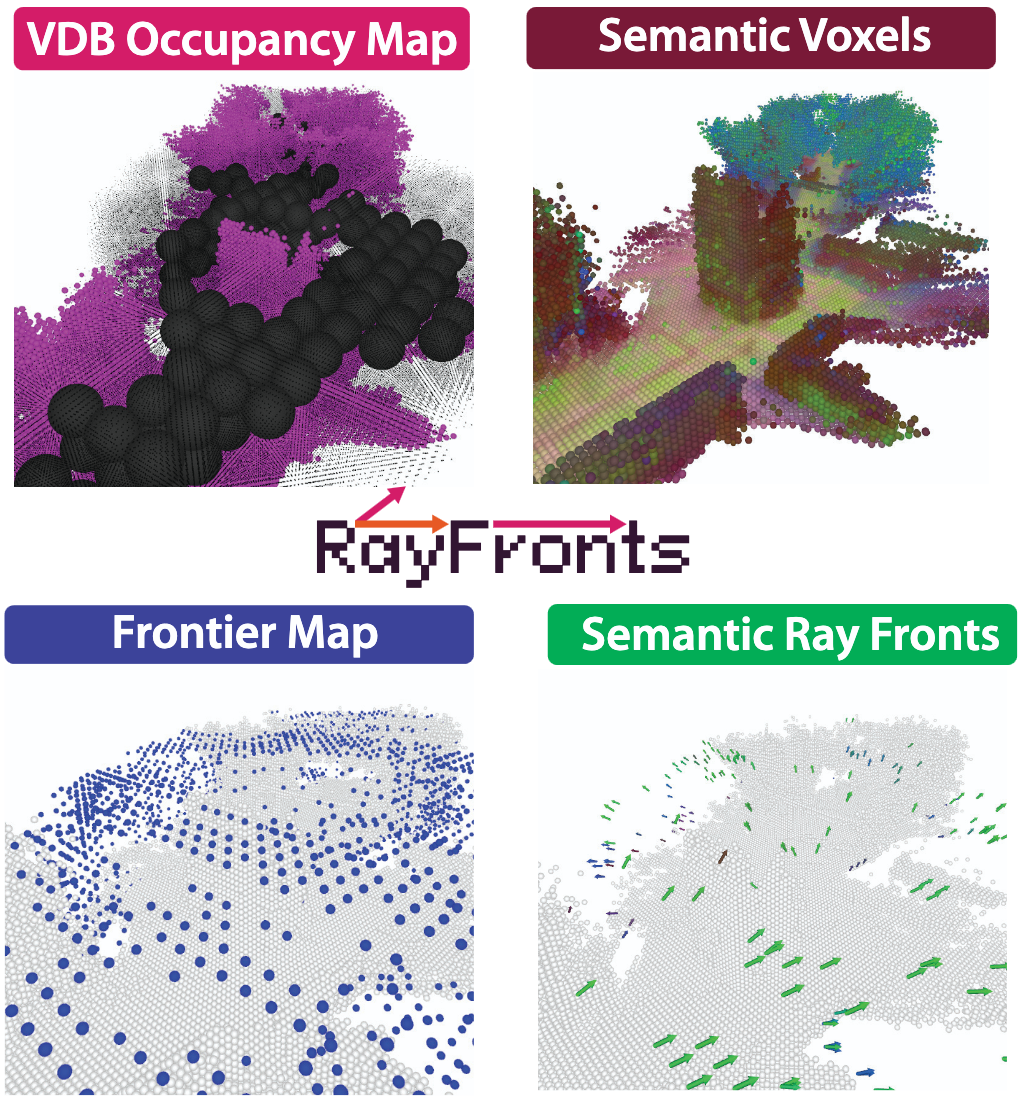
RayFronts: Open-Set Semantic Ray Frontiers for Online Scene Understanding and Exploration
Omar Alama, Avigyan Bhattacharya, Haoyang He, Seungchan Kim, Yuheng Qiu, Wenshan Wang, Cherie Ho, Nikhil Keetha, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
Omar Alama, Avigyan Bhattacharya, Haoyang He, Seungchan Kim, Yuheng Qiu, Wenshan Wang, Cherie Ho, Nikhil Keetha, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
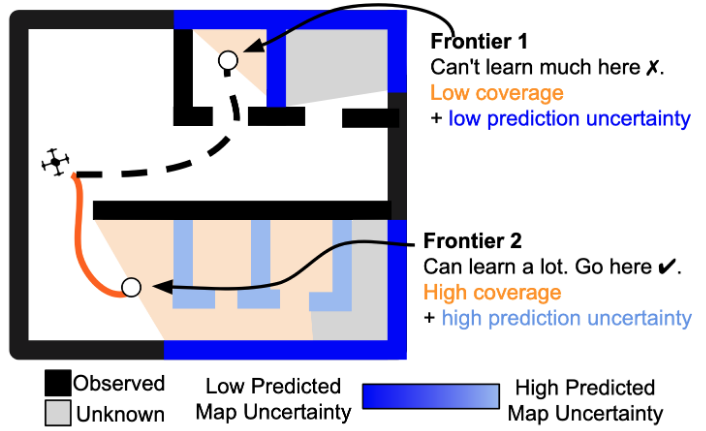
MapEx: Indoor Structure Exploration with Probabilistic Information Gain from Global Map Predictions
Cherie Ho*, Seungchan Kim*, Brady Moon, Aditya Parandekar, Narek Harutyunyan, Chen Wang, Katia Sycara, Graeme Best, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
Cherie Ho*, Seungchan Kim*, Brady Moon, Aditya Parandekar, Narek Harutyunyan, Chen Wang, Katia Sycara, Graeme Best, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
SALON: Self-supervised Adaptive Learning for Off-road Navigation
Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Shubhra Aich, Jeric Lew, Isaiah Adu, Wenshan Wang, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Shubhra Aich, Jeric Lew, Isaiah Adu, Wenshan Wang, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
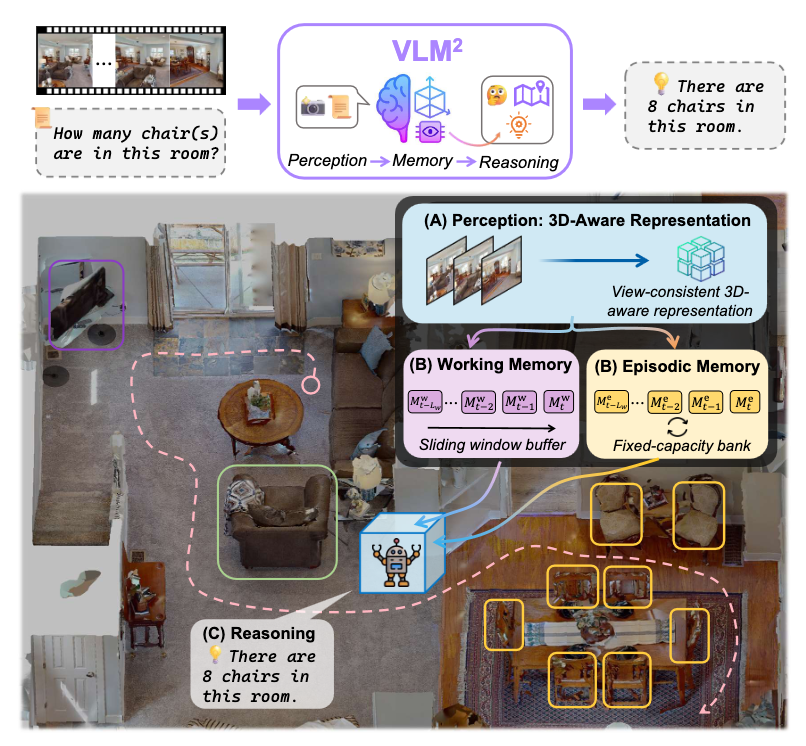
VLM²: Vision-Language Memory for Spatial Reasoning
Zuntao Liu, Yi Du, Taimeng Fu, Shaoshu Su, Cherie Ho, Chen Wang
arXiv preprint, 2025
[Website] [PDF]
Zuntao Liu, Yi Du, Taimeng Fu, Shaoshu Su, Cherie Ho, Chen Wang
arXiv preprint, 2025
[Website] [PDF]
2024

Map It Anywhere: Empowering BEV Map Prediction using Large-scale Public Datasets
Cherie Ho*, Jiaye Zou*, Omar Alama*, Sai Mitheran Jagadesh Kumar, Benjamin Chiang, Taneesh Gupta, Chen Wang, Nikhil Keetha, Katia Sycara, Sebastian Scherer
Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024
[Website] [PDF] [Code]
Cherie Ho*, Jiaye Zou*, Omar Alama*, Sai Mitheran Jagadesh Kumar, Benjamin Chiang, Taneesh Gupta, Chen Wang, Nikhil Keetha, Katia Sycara, Sebastian Scherer
Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024
[Website] [PDF] [Code]
Learning-on-the-Drive: Self-supervised Adaptation of Visual Offroad Traversability Models
Cherie Ho*, Eric Chen*, Mukhtar Maulimov, Chen Wang, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2024
[PDF]
Cherie Ho*, Eric Chen*, Mukhtar Maulimov, Chen Wang, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2024
[PDF]
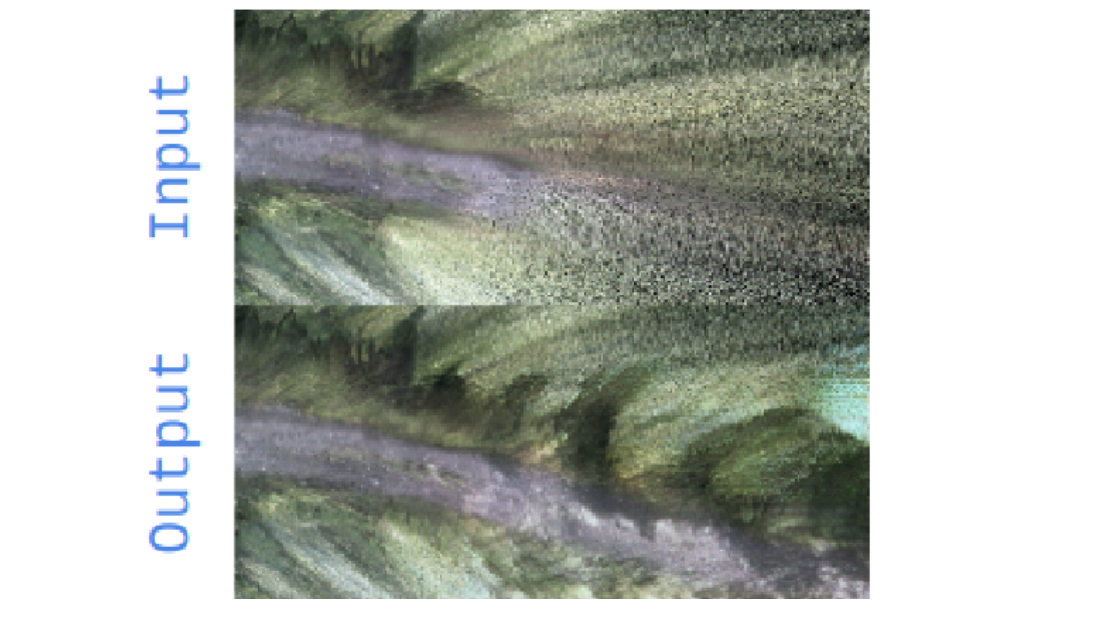
Deep Bayesian Future Fusion for Self-Supervised, High-Resolution, Off-Road Mapping
Shubhra Aich, Wenshan Wang, Parv Maheshwari, Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Jason M Gregory, John G Rogers III, Sebastian Scherer
In Submission, 2024
[PDF]
Shubhra Aich, Wenshan Wang, Parv Maheshwari, Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Jason M Gregory, John G Rogers III, Sebastian Scherer
In Submission, 2024
[PDF]
2023
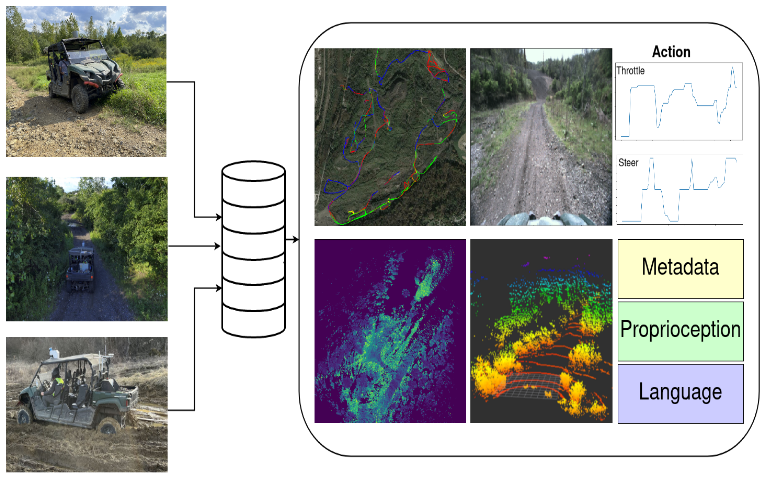
TartanDrive 1.5: Improving Large Multimodal Robotics Dataset Collection and Distribution
Matthew Sivaprakasam, Samuel Triest, Mateo Guaman Castro, Micah Nye, Mukhtar Maulimov, Cherie Ho, Parv Maheshwari, Wenshan Wang, Sebastian Scherer
ICRA Workshop on Pretraining4Robotics, 2023
[PDF]
Matthew Sivaprakasam, Samuel Triest, Mateo Guaman Castro, Micah Nye, Mukhtar Maulimov, Cherie Ho, Parv Maheshwari, Wenshan Wang, Sebastian Scherer
ICRA Workshop on Pretraining4Robotics, 2023
[PDF]
2021
3D Human Reconstruction in the Wild with Collaborative Aerial Cameras
Cherie Ho, Andrew Jong, Harry Freeman, Rohan Rao, Rogerio Bonatti, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2021
[PDF] [Video]
Cherie Ho, Andrew Jong, Harry Freeman, Rohan Rao, Rogerio Bonatti, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2021
[PDF] [Video]
2020
Adaptive Safety Margin Estimation for Safe Real-Time Replanning under Time-Varying Disturbance
Cherie Ho, Jay Patrikar, Rogerio Bonatti, Sebastian Scherer
RSS Workshop on Robust Autonomy, 2020
[Paper] [Shorter Workshop Paper][Video]
Cherie Ho, Jay Patrikar, Rogerio Bonatti, Sebastian Scherer
RSS Workshop on Robust Autonomy, 2020
[Paper] [Shorter Workshop Paper][Video]

“Provably Safe” in the Wild: Testing Control Barrier Functions on a Vision-Based Quadrotor in an Outdoor Environment
Cherie Ho*, Katherine Shih*, Jaskaran Singh Grover, Changliu Liu, Sebastian Scherer
RSS Workshop on Robust Autonomy, 2020
[PDF][Video][Code]
Cherie Ho*, Katherine Shih*, Jaskaran Singh Grover, Changliu Liu, Sebastian Scherer
RSS Workshop on Robust Autonomy, 2020
[PDF][Video][Code]
2019
Autonomous Aerial Cinematography Among Unstructured Environments With Online Artistic Decision-Making
Rogerio Bonatti, Wenshan Wang, Cherie Ho, Aayush Ahuja, Mirko Gschwindt, Efe Camci, Erdal Kayacan, Sanjiban Choudhury, Sebastian Scherer
Journal of Field Robotics, 2019
IROS Workshop on Vision-based Drone Navigation, 2019 [Best Paper Finalist]
[PDF] [Video]
Rogerio Bonatti, Wenshan Wang, Cherie Ho, Aayush Ahuja, Mirko Gschwindt, Efe Camci, Erdal Kayacan, Sanjiban Choudhury, Sebastian Scherer
Journal of Field Robotics, 2019
IROS Workshop on Vision-based Drone Navigation, 2019 [Best Paper Finalist]
[PDF] [Video]
Towards a Robust Aerial Cinematography Platform: Localizing and Tracking Moving Targets in Unstructured Environments
Rogerio Bonatti, Cherie Ho, Wenshan Wang, Sanjiban Choudhury, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2019
[PDF] [Video]
Rogerio Bonatti, Cherie Ho, Wenshan Wang, Sanjiban Choudhury, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2019
[PDF] [Video]
2018

Learning Reactive Flight Control Policies: From LIDAR Measurements to Actions
Sam Zeng, Vaibhav Viswanathan, Cherie Ho and Sebastian Scherer
NeurIPS Workshop on Imitation Learning and its Challenges in Robotics, 2018 [Spotlight Talk]
[PDF]
Sam Zeng, Vaibhav Viswanathan, Cherie Ho and Sebastian Scherer
NeurIPS Workshop on Imitation Learning and its Challenges in Robotics, 2018 [Spotlight Talk]
[PDF]
2017
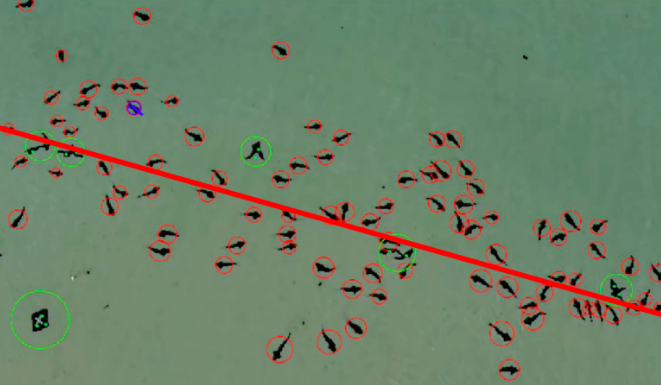
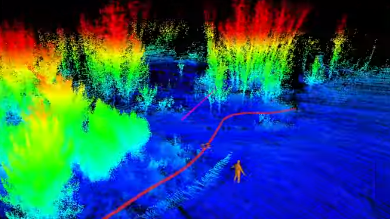
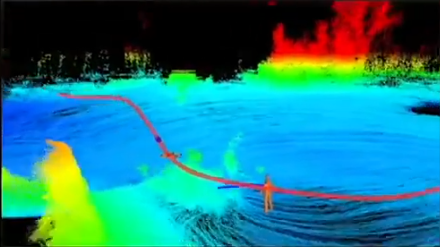
Predicting coordinated group movements of sharks with limited observations using AUVs
Cherie Ho, Kimberly Joly, Andrew P Nosal, Christopher G Lowe, Christopher M Clark
ACM Symposium on Applied Computing (SAC), 2017
[PDF]
Cherie Ho, Kimberly Joly, Andrew P Nosal, Christopher G Lowe, Christopher M Clark
ACM Symposium on Applied Computing (SAC), 2017
[PDF]