MessyMem: Learning-from-Doing Memory for Mobile Manipulation
Anuva Banwasi, William Muckelroy III, Priya Sundaresan, Linfeng Zhao, Jeannette Bohg, Cherie Ho
Coming soon
Hi, I’m Cherie! I am a postdoc at Stanford University working with Prof. Jeannette Bohg. I am grateful to be supported by the Croucher Fellowship for Postdoctoral Research. I completed my PhD in the Robotics Institute at Carnegie Mellon University, where I was advised by Prof. Sebastian Scherer.

Multi-Drone Motion Capture

Offroad Driving

Urban Wheelchair
Mobile Manipulation
I build flexible and self-improving robots that operate reliably in messy, real-world environments. My research focuses on how robots can build flexible memory for long-horizon tasks, be steered by different types of goals, reason about uncertainty and consequences, and continually self-improve through their own experience. I enjoy working across diverse robotic platforms, including multi-drone systems, high-speed offroad driving, urban wheelchairs, and now mobile manipulators in unstructured indoor and outdoor environments.
Email: cherieho at stanford dot edu
CV / Google Scholar / Twitter / LinkedIn
Recent News
- 06/26 Robot evaluation is hard! We wrote a blog on practical frameworks for robot evaluation based on our RSS workshop.
- 03/26 Gave a guest lecture for JHU’s Introduction to Robot Learning course!
- 07/25 Started my postdoc at Stanford with Prof. Jeannette Bohg working on mobile manipulators!
- 07/25 Gratefully awarded the Croucher Fellowship for two years of postdoc funding to work on “Flexible and Self-Improving Robots”!
- 04/25 Honored to be one of the 33 RSS Pioneers.
- 01/25 2 papers accepted to ICRA 2025! One on predicting world models for exploration, another on autonomous exploration and adaptation for offroad driving.
- 10/24 Thrilled to be at OECD in Paris for the AI and the Future of Skills AI expert meeting. Excited to capture thoughts on measuring robotics capability in the “Robotic intelligence scale” chapter of the OECD’s AI Capability Indicators whitepaper!
Selected Publications
See the full list of my publication here.
2026

MessyNav: Zero-Shot Navigation via Manipulation in Messy Environments
Kenneth Llontop, Cherie Ho, Dylan Zhou, Anuva Banwasi, Carlota Pares-Morlans, Priya Sundaresan, Jeannette Bohg
Coming soon
Kenneth Llontop, Cherie Ho, Dylan Zhou, Anuva Banwasi, Carlota Pares-Morlans, Priya Sundaresan, Jeannette Bohg
Coming soon
Robot-Powered Data Flywheels: Deploying Robots in the Wild for Continual Data Collection and Foundation Model Adaptation
Jennifer Grannen, Michelle Pan, Kenneth Llontop, Cherie Ho, Mark Zolotas, Jeannette Bohg, Dorsa Sadigh
arXiv preprint, 2026
[Website] [PDF]
Jennifer Grannen, Michelle Pan, Kenneth Llontop, Cherie Ho, Mark Zolotas, Jeannette Bohg, Dorsa Sadigh
arXiv preprint, 2026
[Website] [PDF]
2025
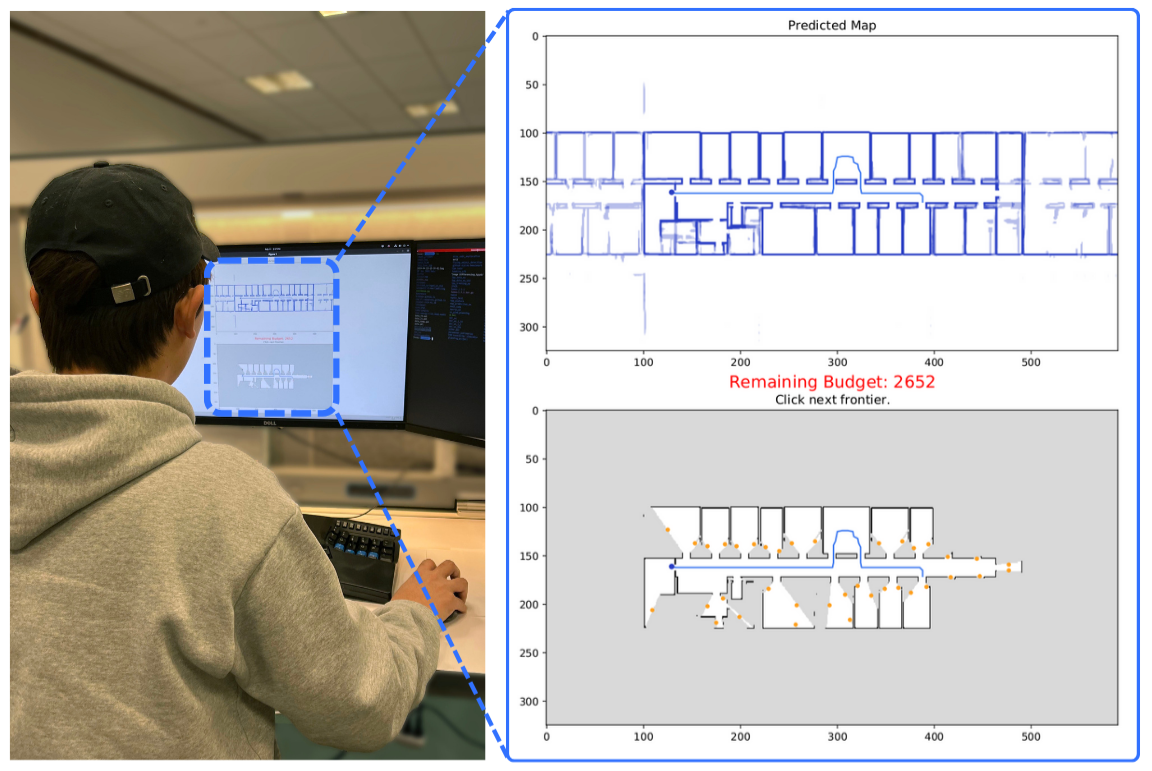
MapExRL: Human-Inspired Indoor Exploration with Predicted Environment Context and Reinforcement Learning
Narek Harutyunyan, Brady Moon, Seungchan Kim, Cherie Ho, Adam Hung, Sebastian Scherer
IEEE International Conference on Advanced Robotics (ICAR), 2025
[Website] [PDF]
Narek Harutyunyan, Brady Moon, Seungchan Kim, Cherie Ho, Adam Hung, Sebastian Scherer
IEEE International Conference on Advanced Robotics (ICAR), 2025
[Website] [PDF]
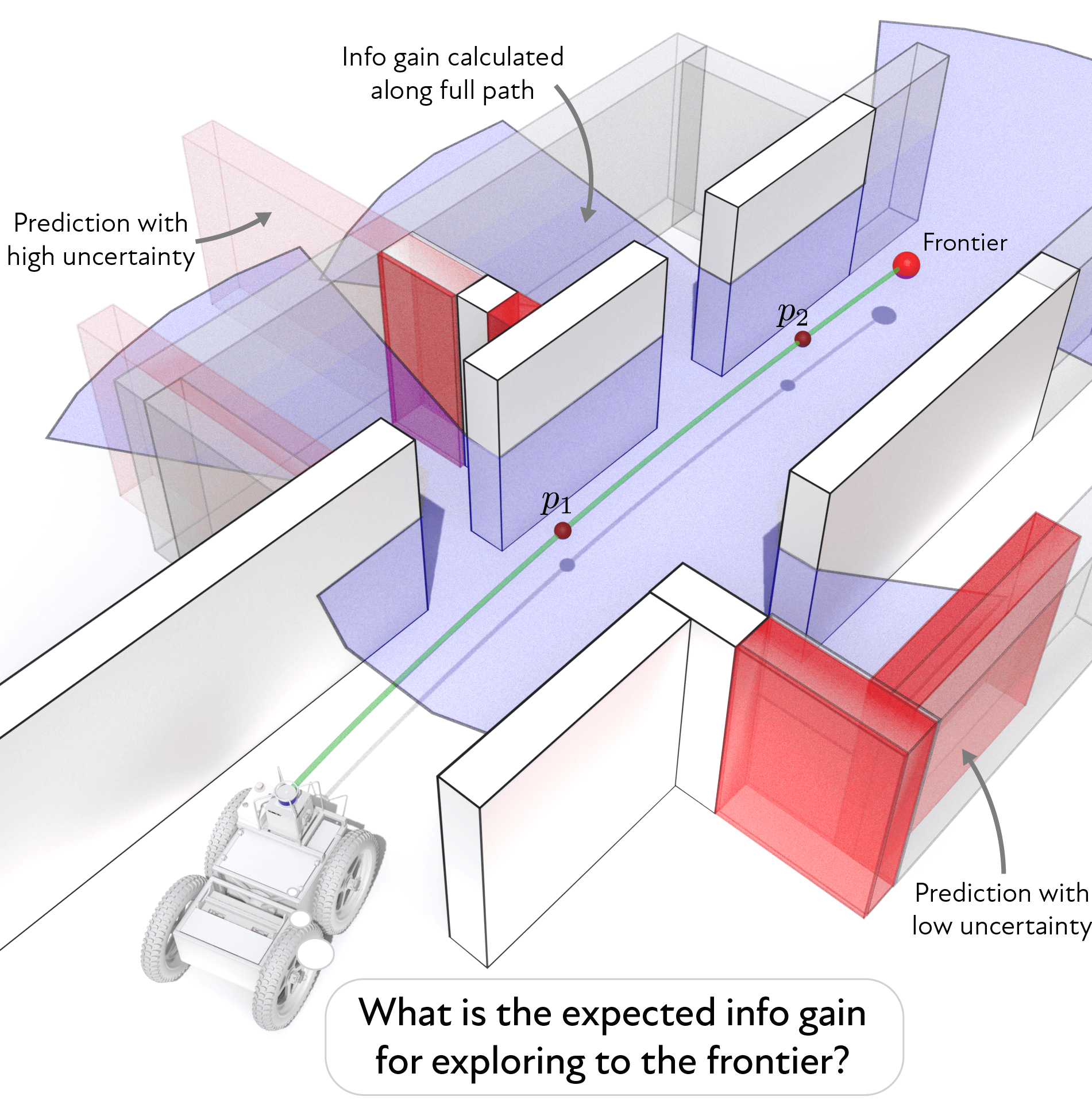
PIPE Planner: Pathwise Information Gain with Map Predictions for Indoor Robot Exploration
Seungjae Baek, Brady Moon, Seungchan Kim, Muqing Cao, Cherie Ho, Sebastian Scherer, Jeong hwan Jeon
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
Seungjae Baek, Brady Moon, Seungchan Kim, Muqing Cao, Cherie Ho, Sebastian Scherer, Jeong hwan Jeon
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
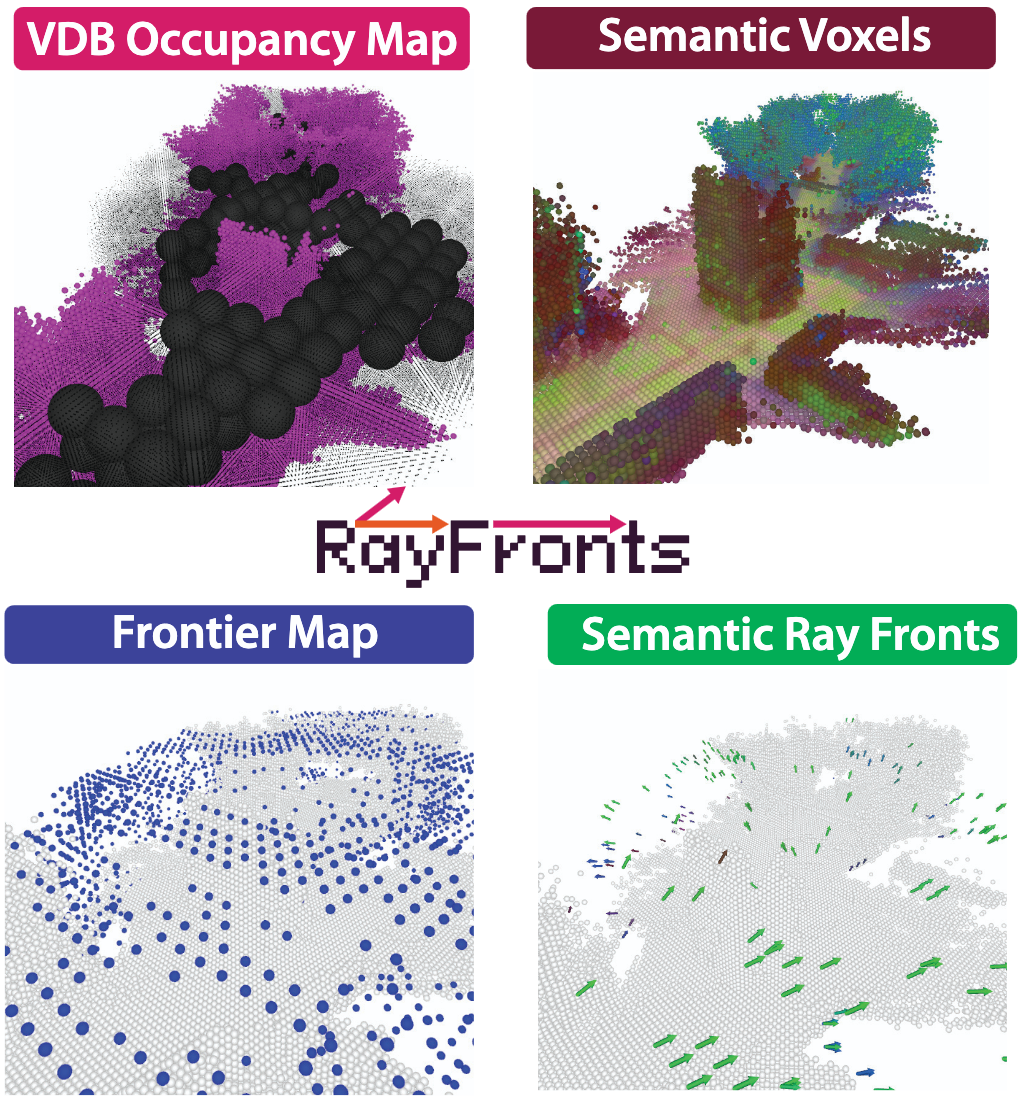
RayFronts: Open-Set Semantic Ray Frontiers for Online Scene Understanding and Exploration
Omar Alama, Avigyan Bhattacharya, Haoyang He, Seungchan Kim, Yuheng Qiu, Wenshan Wang, Cherie Ho, Nikhil Keetha, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
Omar Alama, Avigyan Bhattacharya, Haoyang He, Seungchan Kim, Yuheng Qiu, Wenshan Wang, Cherie Ho, Nikhil Keetha, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
[Website] [PDF] [Code]
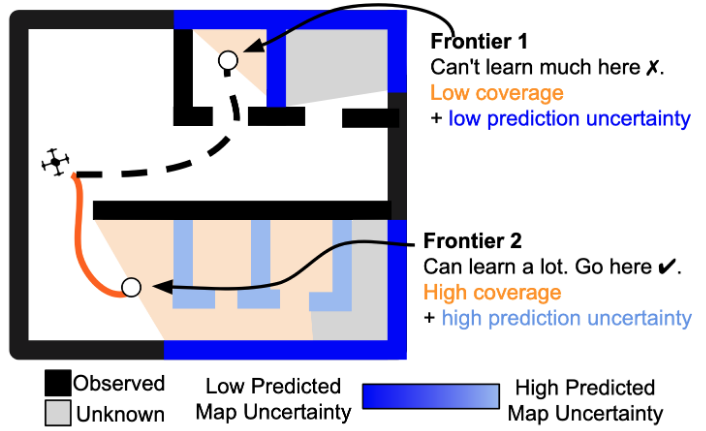
MapEx: Indoor Structure Exploration with Probabilistic Information Gain from Global Map Predictions
Cherie Ho*, Seungchan Kim*, Brady Moon, Aditya Parandekar, Narek Harutyunyan, Chen Wang, Katia Sycara, Graeme Best, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
Cherie Ho*, Seungchan Kim*, Brady Moon, Aditya Parandekar, Narek Harutyunyan, Chen Wang, Katia Sycara, Graeme Best, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
SALON: Self-supervised Adaptive Learning for Off-road Navigation
Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Shubhra Aich, Jeric Lew, Isaiah Adu, Wenshan Wang, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Shubhra Aich, Jeric Lew, Isaiah Adu, Wenshan Wang, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Website] [PDF] [Code]
2024

Map It Anywhere: Empowering BEV Map Prediction using Large-scale Public Datasets
Cherie Ho*, Jiaye Zou*, Omar Alama*, Sai Mitheran Jagadesh Kumar, Benjamin Chiang, Taneesh Gupta, Chen Wang, Nikhil Keetha, Katia Sycara, Sebastian Scherer
Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024
[Website] [PDF] [Code]
Cherie Ho*, Jiaye Zou*, Omar Alama*, Sai Mitheran Jagadesh Kumar, Benjamin Chiang, Taneesh Gupta, Chen Wang, Nikhil Keetha, Katia Sycara, Sebastian Scherer
Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024
[Website] [PDF] [Code]
Learning-on-the-Drive: Self-supervised Adaptation of Visual Offroad Traversability Models
Cherie Ho*, Eric Chen*, Mukhtar Maulimov, Chen Wang, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2024
[PDF]
Cherie Ho*, Eric Chen*, Mukhtar Maulimov, Chen Wang, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2024
[PDF]
2021
3D Human Reconstruction in the Wild with Collaborative Aerial Cameras
Cherie Ho, Andrew Jong, Harry Freeman, Rohan Rao, Rogerio Bonatti, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2021
[PDF] [Video]
Cherie Ho, Andrew Jong, Harry Freeman, Rohan Rao, Rogerio Bonatti, Sebastian Scherer
International Conference on Intelligent Robots and Systems (IROS), 2021
[PDF] [Video]
Honors & Awards
- 2025 Croucher Fellowship for Postdoctoral Research
- 2025 Robotics: Science and Systems (RSS) Pioneer
- 2019-2021 Croucher Scholarship for Doctoral Study (Full Scholarship)
- 2019 Best Paper Finalist, IROS Vision-based Drones Workshop
- 2018 HMC INQ Inaugural Class (Harvey Mudd Startup Incubator)
- 2017 Harvey Mudd College Johnson Excellence in Engineering Award
- 2017 Harvey Mudd College Engineering Departmental Honors
- 2014 - 2017 Jude and Eileen Laspa Fellowship in Autonomous Systems